
حل الوحدة الثالثة برمجة الروبوت الافتراضي مهارات رقمية أول متوسط ف3
الدرس الاول : الروبوتات الافتراضية
ماهو الواقع الإفتراضي :
الواقع الافتراضي هو محاكاة يمكن أن تكون مشابهة للعالم الحقيقي أو مختلفة تماما عنه . ويتم ذلك من خلال استخدام بيئة اصطناعية يتم إنشاؤها باستخدام البارمج و تقدم للمستخدم بطريقة تجعله يعتقد أنه بيئة حقيقية و يتقبله
لنطبق معا
تدريب 1
السؤال : حدد الجملة الصحيحة و الخاطئة فيما يلي
1- الواقع الافتراضي هو محاكة يمكن ان تكون مشابهة للعالم الحقيقي أو مختلفة تماما عنه ( صح )
2- تتضمن الروبوتات الافتراضية عمليات محاكاة تستخدم لإنشاء برامج للروبوتات ( صح )
3- المحاكاة الروبوتية هي وسيلة مهمة للتعرف على مفاهيم الطبيعة المختلفة ( صح )
4- الروبوت الافتراضي يناسب اسلوب تعلم واحد محدد فقط ( خطأ )
5- عندما تستخدم الروبوتات الافتراضية لا يمكننا تشخيص الخطأ و تصحيحه بسرعة ( خطأ )
6- عندما تستخدم الروبوتات الافتراضية تتجنب إتلاف أي معدات ( صح )
7- تحتاج إلى إنفاق الكثير من المال لاستخدام ادوات الروبوتات الافتراضية ( خطأ )
8- عندما تستخدم الروبوتات الافتراضية يكون لدينا القدرة على إنشاء الروبوتات ذات الميزات المتقدمة ( صح )
تدريب 2
السؤال : طابق طرق عرض الكاميرا المختلفة مع العرض الصحيح
 | Top Camera ( الكاميرا العلوي ) ( 3 ) |
 | Chase Camera ( كاميرا التتبع ) ( 1 ) |
 | First Person Camera ( كاميرا الشخص الاول ) ( 2 ) |
تدريب 3
السؤال : أكمل الصناديق الفارغة بمسيماتها الصحيحة
تدريب 4
السؤال : انشئ برنامجا ليتحرك الروبوت إلى الامام بمقدار 5 مربعات ثم ينعطف يسارا مسافة 5 مربعات ، يجب ضبط السرعة عند تحرك الروبوت إلى 20 %

الدرس الثاني : الإحداثيات في البرمجة
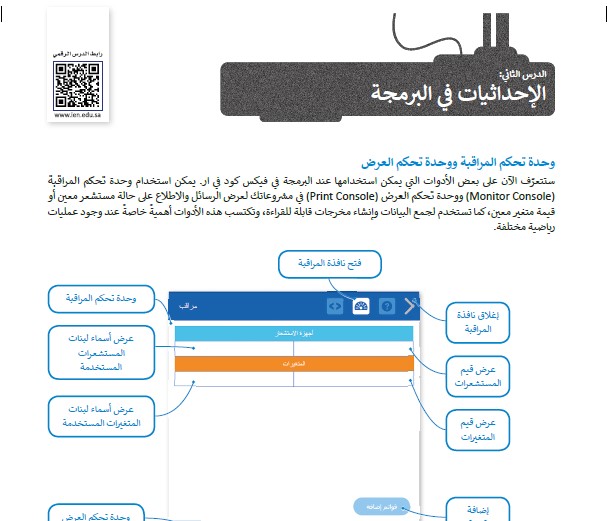
وحدة تحكم المراقبة ووحدة تحكم العرض
ستتعرف الآن على بعض الادوات التي يمكن استخدامها عند البرمجة في فيكس كود في ار يمكن استخدام وحدة تحكم المراقبة ووحدة تحكم العرض في مشروعاتك لعرض الرسائل و الاطلاع على حالة مستشعر معين أو قيمة متغير كما تستخدم لجمع البيانات و إنشاء مخرجات قابلة للقراءة و تكتسب هذه الادوات اهمية خاصة عند وجود عمليات رياضية
نظام الإحداثيات
بعد أن تعرفت على كيفية طباعة رسالة ستعرف على نظام الإحداثيات وكيفية استخدامه يمكن تعريف نظام الإحداثيات بانه نظام مرجعي يستخدم الارقام ( أو الإحداثيات ) لتحديد موضع نقاط محددة في مخطط معين
لنطبق معا
تدريب 1
السؤال : حدد الجملة الصحيحة و الخاطئة فيما يلي
1- يمكنك ان ترى قيمة او نصا في نافذة المراقبة باستخدام وحدة تحكم العرض ( صح )
2- تحدد القيمة Y موقع الروبوت على المحور الافقي ( خطأ )
3- إذا كانت إحداثيات موقع الروبوت x و y تساوي صفرا فإن الروبوت يقع في منتصف المنصة ( صح )
4- يمكنك رسم اشكال فقط في صاحة لعب الفن قماش ( خطأ )
5- يمكنك تغيير ساحة اللعب بالضغط على القائمة المنسدلة أعلى نافذة ساحة اللعب ( صح )
6- يستخدم الروبوت قلم الروبوت الموجود في الجزء الخلفي منه للرسم ( خطأ )
تدريب 2
السؤال : انشئ برنامجا لرسم مثلث و اعرض الرسالتين كالتالي
-بداية البرنامج
-تم إكمال المثلث
الجواب :

تدريب 3
بناء على آخر برنامج انشأته في هذا الدرس ، هل يمكنك إنشاء دائرتين إضافيتين ؟
حاول ان تنشئ دائرة أصغر من الدائرة الحمراء و أخرى أكبر من الدائرة الخضراء
لإنشاء دائرتين إضافيتين لاتنس استخدام اوامر التكرار


تدريب 4
استخدم ساحة لعب الفن قماش لإنشاء برنامج يمكن الروبوت من تشكيل مضلع بثمانية اضلاع وزوايا متساوية . يجب ان يكون لون نصف كل ضلع من اضلاعه باللون أحمر و النصف الآخر باللون الازرق يمكنك استخدام الصورة ادناه لحساب الدرجات التي يحتاجها الروبوت في كل انعطاف .
يتحرك الروبوت إلى النقطة بإحداثيات ( 0 : X مليمتر و 300 :Y مليمتر ) لرسم الضلع الاول

الدرس الثالث : الحركة التلقائية
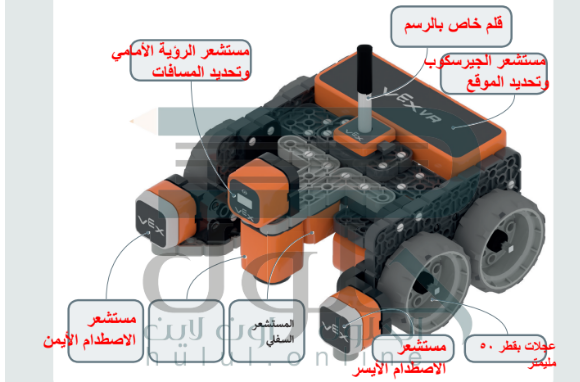
المستشعرات
يوجد في فيكس كود في آر عدة مستشعرات يمكن استخدامها للتحكم في حركة الروبوت المختلفة ، بشكل عام تستخدم المستشعرات لاكتشاف التغيرات في البيئة المحيطة فعند ذهابك لمركز تجاري مثلا ، تفتح بعض الابواب صورة تلقائية لاحتوائها على مستشعر للأشعة تحت الحمراء يمكنه اكتشاف التغير في درجة الحرارة . ستتعرف في هذا الدرس على كيفية استخدام مستشعر الجيرسكوب لتحريك روبوتك في ساحة اللعب
لنطبق معا
تدريب 1
السؤال : ما مستشعر الجيرسكوب ؟ وكيف يمكن استخدامه في حركة الروبوت ؟
الجواب :
يوجد مستشعر الجيرسكوب في الجزء الخلفي من الروبوت ، يتم تحديد موضوع الروبوت الافتراضي وفق مركزه للأنعطاف وهو ايضا موقع قلم الروبوت
يستخدم مستشعر الجيرسكوب في الملاحة فمن خلال السرعة و الطريقة التي بتعطف بها الروبوت يمكنه تحديد اتجاه انعطاف الروبوت
يمكن مستشعر الجيرسكوب الروبوت من القيادة بشكل مستقيم و الانعطاف بصورة صحيحة لاحظ ان مستشعر الجيرسكوب يمكنه اكتشاف ما إذا كانت الحركة في اتجاه عقارب الساعة أو عكس اتجاه عقارب الساعة بالإضافة لإلى تحديد تغيير موقع الروبوت أثناء تحركه في ساحة اللعب
تدريب 2
السؤال : طابق اللبنات البرمجية بوظيفتها الصحيحة
1-  | تحدد الاتجاه المواجه لنظام الدفع باستخدام وضع الزاوية الحالي لمستشعر الجيرسكوب ( 4 ) |
| 2- دوران القيادة بالدرجات | تحدد موضع إحداثيات X أو Y للروبوت الافتراضي بالمليمتر أو بالبوضة ( 1 ) |
| 3- زاوية الموضع بالدرجات | تحدد الاتجاه الحالي الذي يواجهه الروبوت الافتراضي بالدرجات ( 3 ) |
| 4- إتجاه المواجهه لنظام القيادة بالدرجات | تحدد زاوية انعطاق بواسطة مستشعر ( 2 ) |
تدريب 3
اعتمادا على البرنامج الاخير الموجود بالدرس ، أجر التغيرات المناسبة في ساحة لعب الفن قماش
ملاحظة : أضلاه المستطيل المتقابلة متساوية
الجواب :

تدريب 4
استخدم ساحة لعب شبكة خريطة و أنشئ برنامجا يبدأ به ( 900 : X مليمتر و 900 : Y ) وينتهي في منتصف هذه الساحة
>استخدم لبنات الموضع ( ) بالمليمتر للحركة و زاوية الموقف في درجة للتحرك
الجواب :


.